
Motorredutor de corrente miniatura série PX
Visão geral
Os motores redutores CC em miniatura da série J-SZ (ZYT) -PX são compostos, respectivamente, de motores CC da série SZ (ZYT) e redutores planetários de precisão comuns do tipo PX e equipados com fonte de alimentação, que pode realizar regulação de velocidade contínua.Ampla faixa de ajuste, tamanho pequeno, peso leve, alta eficiência, estrutura compacta, grande torque de saída, amplamente utilizado em drives que exigem baixa velocidade, alto torque e regulação de velocidade contínua.Velocidade infinitamente variável.
O redutor de engrenagem planetária da série PX pode ser conectado diretamente a motores CA, motores de passo e outros motores.
A série PX também pode ser conectada diretamente ao redutor de engrenagem helicoidal e ao redutor catavento cicloidal para formar redutores com diferentes relações de velocidade ou grandes relações de velocidade.
Instrução do modelo redutor
Modelo de motor
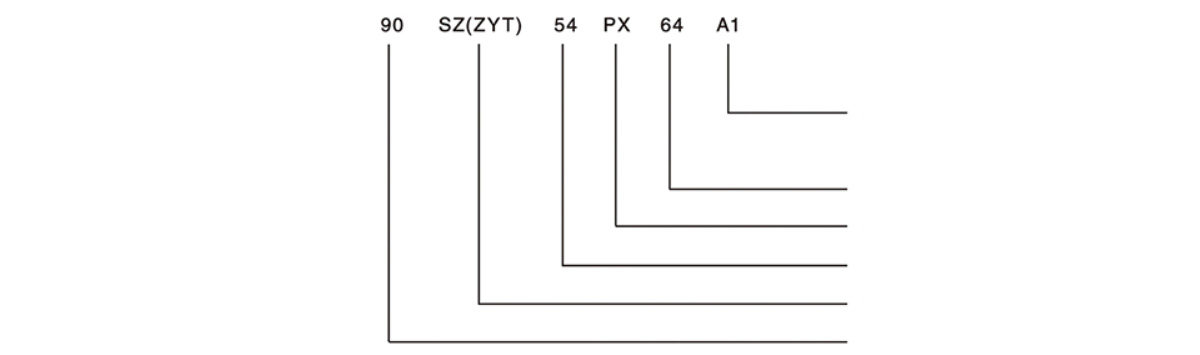
A1-forma de instalação: A1 é instalação de pés, A3 é instalação de flange, B5 é instalação de flange redondo
64 -Relação de redução: 1:64
PX - Redutor Planetário de Precisão Comum
54 - Código do parâmetro de desempenho do motor
SZ (ZYT) - Servo Motor DC (Motor DC de ímã permanente)
90 - Número base do motor: Indica diâmetro externo de 90mm
Modelo Redutor
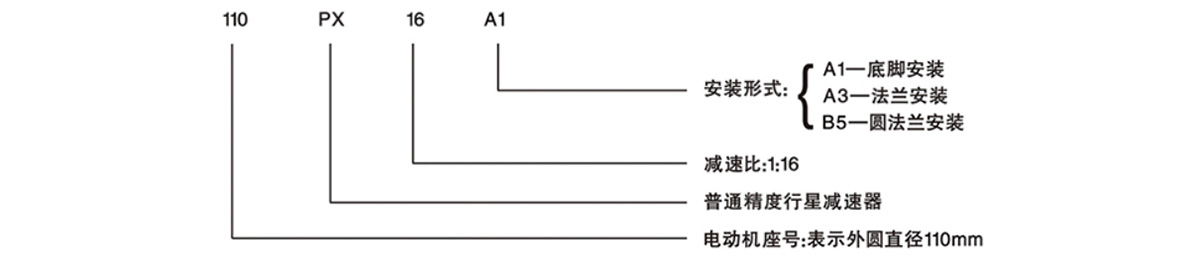
A1-forma de instalação: A1 é instalação de pés, A3 é instalação de flange, B5 é instalação de flange redondo
16 - Relação de redução: 1:64
PX - Redutor Planetário de Precisão Comum
110 - Número base do motor: Indica diâmetro externo de 90mm
Os dados técnicos do motor elétrico
| Velocidade (r/min) | Torque (mN.m) | Modelo | Poder | Velocidade nominal (r/min) | Instalar | Tensão nominal | Reduzir proporção | Observações | |
| 750 | 260 | 55ZYT | 29 | 3.000 | A3 | 24V:55ZYT51 27V:55ZYT52 48V:55ZYT53 110V:55ZYT54 | 4 | ||
| 187,5 | 740 | 16 | |||||||
| 47 | 21200 | 64 | |||||||
| 12 | 5900 | 256 | |||||||
| 500 | 390 | 6 | |||||||
| 83 | 1660 | 36 | |||||||
| 14 | 7180 | 216 | |||||||
| 750 | 450 | 70ZYT01 | 50 | 30.000 | 24 | 4 | |||
| 70ZYT02 | 27 | ||||||||
| 70ZYT03 | 48 | ||||||||
| 70ZYT04 | 110 | ||||||||
| 1500 | 380 | 70ZYT05 | 85 | 6.000 | 24 | 4 | |||
| 70ZYT06 | 27 | ||||||||
| 70ZYT07 | 48 | ||||||||
| 70ZYT08 | 110 | ||||||||
| 750 | 630 | 70ZYT51 | 70 | 3.000 | 24 | 4 | |||
| 70ZYT52 | 27 | ||||||||
| 70ZYT53 | 48 | ||||||||
| 70ZYT54 | 110 | ||||||||
| 1500 | 540 | 70ZYT55 | 120 | 6.000 | 24 | 4 | |||
| 70ZYT56 | 27 | ||||||||
| 70ZYT57 | 48 | ||||||||
| 70ZYT58 | 110 | ||||||||
| 187,5 | 1270 | 70ZYT01 | 50 | 3.000 | 24 | 16 | |||
| 70ZYT02 | 27 | ||||||||
| 70ZYT03 | 48 | ||||||||
| 70ZYT04 | 110 | ||||||||
| 187,5 | 1780 | 70ZYT51 | 70 | 3.000 | 24 | 16 | |||
| 70ZYT52 | 27 | ||||||||
| 70ZYT53 | 48 | ||||||||
| 70ZYT54 | 110 | ||||||||
| 47 | 3670 | 70ZYT01 | 50 | 3.000 | 24 | 64 | |||
| 70ZYT02 | 27 | ||||||||
| 70ZYT03 | 48 | ||||||||
| 70ZYT04 | 110 | ||||||||
| 750 | 360 | 70SZ01 | 40 | 3.000 | 24 | 24 | 4 | ||
| 70SZ02 | 27 | 27 | |||||||
| 70SZ03 | 48 | 48 | |||||||
| 70SZ04 | 110 | 110 | |||||||
Relação geral de velocidade da série PS
Nível 1: 4, 6
Secundário: 16, 24, 36
Nível 3: 64, 96, 144, 216
Nível 4: 256\384\576\864\1296
Taxa de velocidade não padrão da série 90PX
Nível 1: 3
Nível 2: 9, 12, 18
Nível 3: 27, 48, 54, 72, 108
Nível 4: 81, 162, 192, 288, 324, 432, 648
Taxa de velocidade não padrão da série 110PX
Nível 1: 5
Nível 2: 20, 25, 30
Nível 3: 80, 100, 120, 125, 150, 180
Nível 4: 320, 400, 480, 500, 600, 625, 720, 750, 900, 1080
Redutores não padronizados, como relação de velocidade especial, velocidade, tamanho de instalação, etc., podem ser projetados
Exemplo de seleção
O usuário pode selecionar corretamente a potência e o modelo do redutor de acordo com o sistema de trabalho real e a natureza da carga consultando o conteúdo a seguir.
1.De acordo com o torque de carga e a velocidade de saída do redutor, a potência necessária pode ser calculada pela seguinte fórmula: P=T n/kh
Na fórmula: P- potência de saída WT - torque de carga Nm, selecione n- velocidade de saída r/min conforme ficha técnica
K- constante de carga 9560 η - eficiência de transmissão, selecionada na tabela a seguir
Taxa de transmissão
| Relação de transmissão(i) | 4(6) | 16(36) | 64(216) | 256(1296) |
| η | 0,76 | 0,72 | 0,68 | 0,65 |
2.O governador do motor pode ser selecionado para realizar a mudança contínua da velocidade do redutor de O para a velocidade nominal.
3. De acordo com o sistema de trabalho real e a natureza da carga, o coeficiente de serviço pode ser selecionado com referência à tabela de coeficientes de serviço.Após o cálculo, pode-se determinar a potência necessária do redutor e, de acordo com a velocidade de saída necessária, o modelo do redutor pode ser selecionado consultando a tabela de dados técnicos.
Folha de índice de trabalho
| Tempo de trabalho diário | Nível de carga | |||
| Média estável | Médio vibrante | Fortemente impacto | ||
| 12 | 1 | 1,25 | 1,75 | |
| 24 | 1,25 | 1,50 | 2 | |
Por exemplo: se a carga for uniforme e estável, a potência nominal do motor necessária for 40W, a tensão nominal for 110V, a relação de velocidade de saída for 4 e o tempo de trabalho por dia for 12h, então 40W é selecionado.Se a natureza da carga for vibração moderada:
Então uma.Consulte a tabela de coeficientes de serviço para selecionar a série de serviço como 1,25.Potência necessária W = 40 W * 1,25 = 50 W
b.Consulte a ficha técnica do opcional J70SZ54P*4
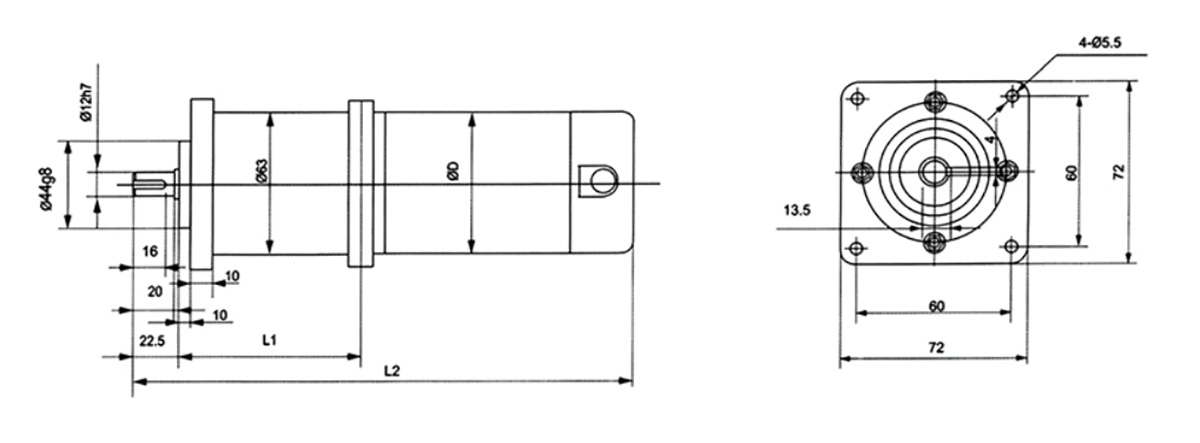
Flange frontal 70PX
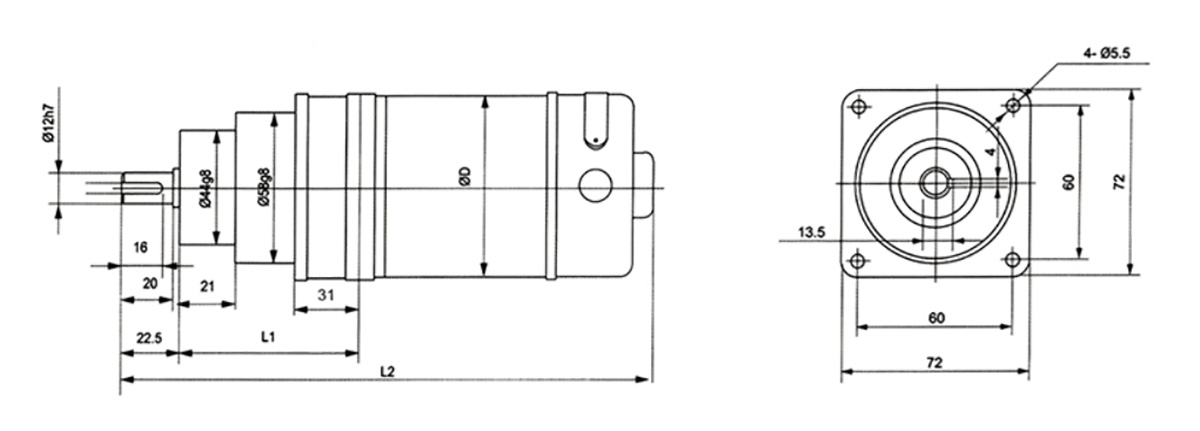
Flange traseira 70PX
Categorias de produtos
-

Motor de redução DC 15W30W60W90W120W200W300W lento...
-

Motor de desaceleração DC de ímã permanente 12V24V 1...
-

Motor de escova principal 250W-600W 12-48V da vassoura para ...
-

Motor de ímã permanente DC sem escova 96V7.5KW ne...
-

Motor de desaceleração DC planetário 42XA775 grande t...
-

Motor de turbina de redução DC Xinda rv40 12 / 24v2...





